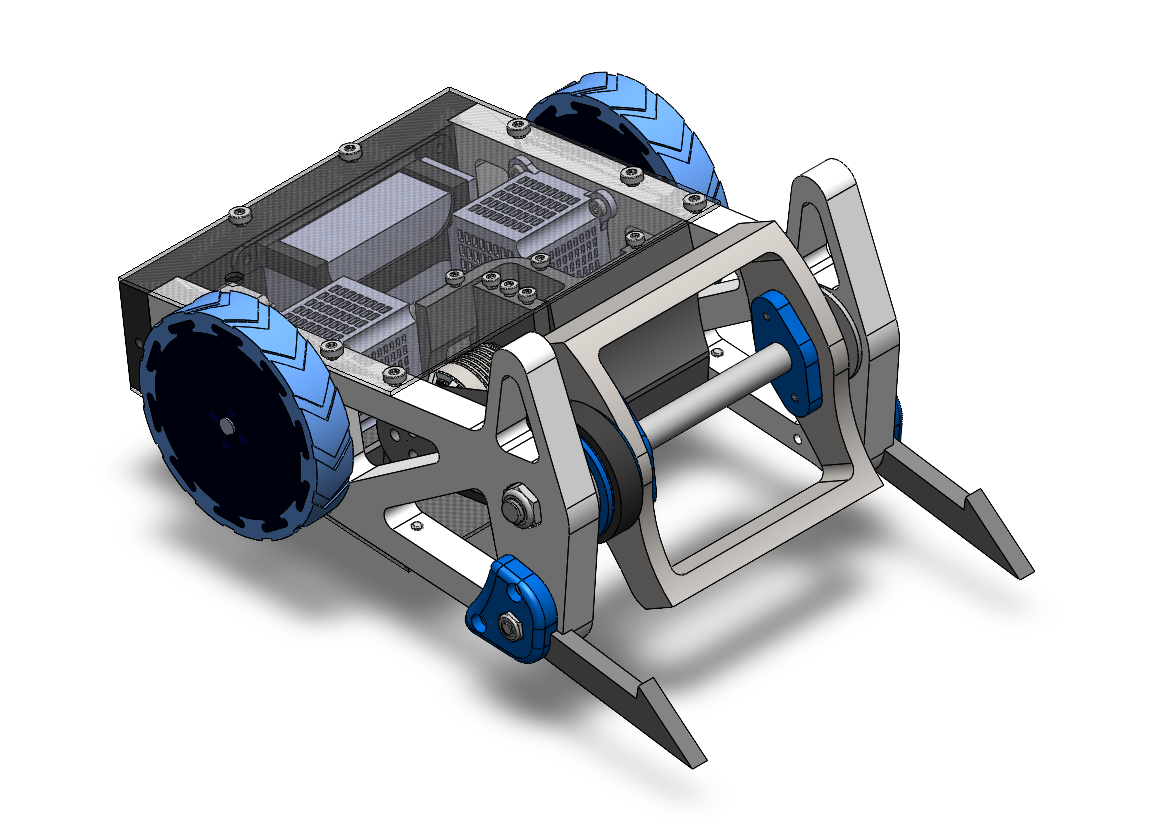
Tera-BITE is a beetlweight combat robot that features a high speed egg beater weapon, a two wheel drive system, and a 4 cell Lipo battery. In combat robotics, components aren't just designed for functionality, but also durability and resilience. So my approach for this project was generally to zoom into each subsystem individually, then design, test, and iterate on it.
Perhaps the most important, and also most difficult to design, part of a battle bot is its weapon. Designing an egg beater involves balancing a ton of variables, namely the the weight, diameter, moment of inertia, and aerodynamic drag of the beater. Ultimately, the effectiveness of the beater at best conditions really comes down to the equation for energy: KE = (1/2)Iⲱ^2 + (1/2)mv^2, and the equation for bite: d = 60v/RPM. The beater I designed was on the heavier side which allowed me to increase my energy output, but also had complications which I will discuss later.
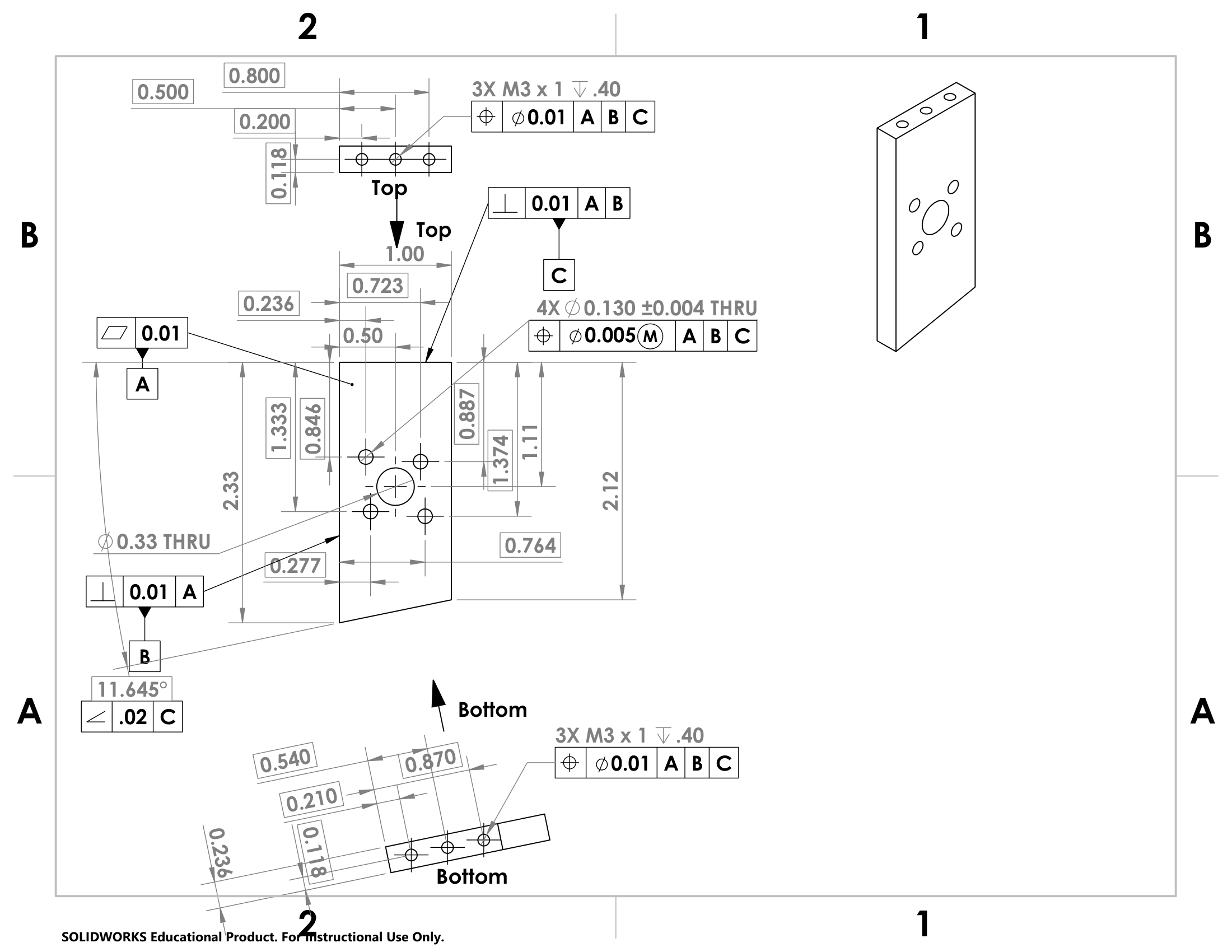
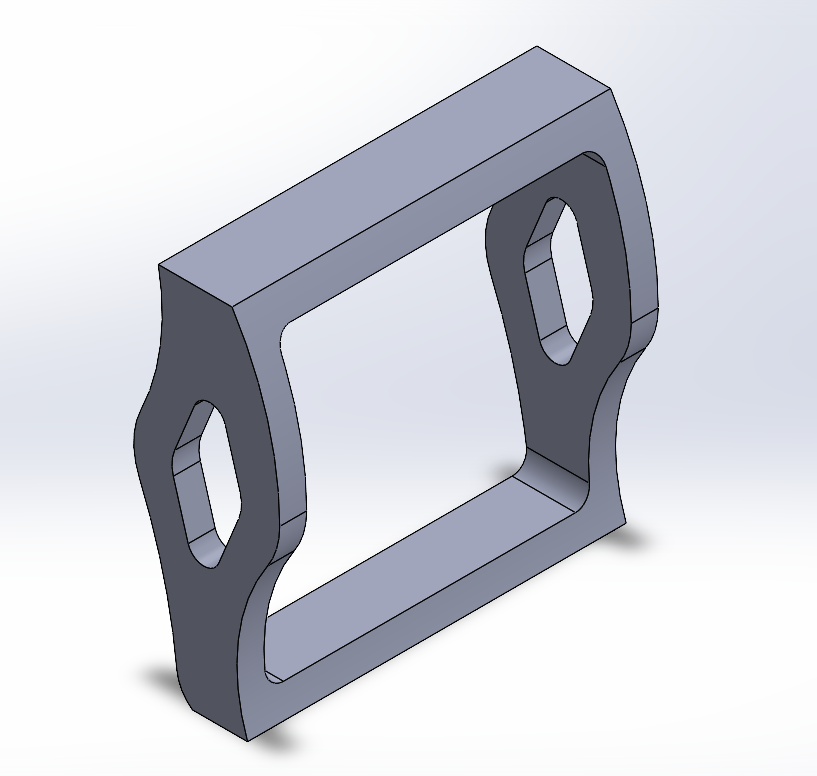
This motor mount was a good opportunity for me to brush up on my GD&T skills and my machining skills. I made this drawing for the motor mount in SolidWorks and added GD&T callouts where necessary. I machined this part on the manual mill and used a 3D printed jig to prop the mount to create the slant in the part.
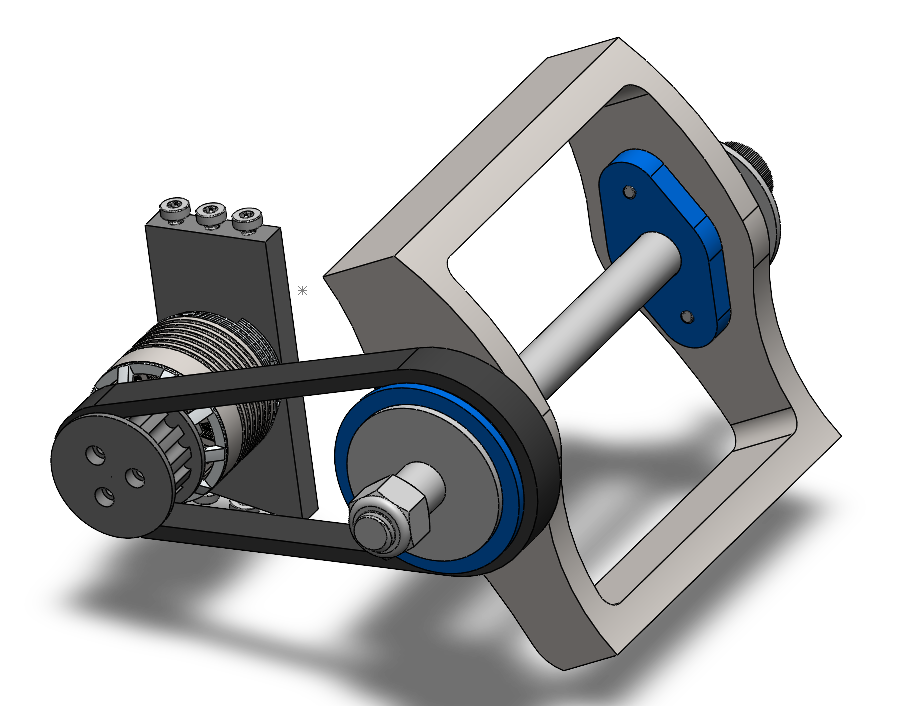
For the final iteration, I'm using an 1800 KV BLDC with a 13:23 gear reduction and a Talon 35A ESC to control it. Instead of putting screws in shear, I made it so that my driven pulley keys onto the beater to transfer the torque from the belt.
Weapon System Data
Live data table exported from Google Sheets (single tab view).
After first testing the system with a 1000 KV motor, I got an overcurrent warning on the ESC which shut the motor down. So I set up an experiment in order to figure out what is causing it. I wrote down all the variables that could have caused this overcurrent warning down in a spreadsheet, changed one variable at a time, and then I measured the real current draw with a wattmeter. I was then able to optimize my design to minimize mechanical friction so that the bulk of the resistance comes from aerodynamic drag rather than a poor powertrain design. In the future, I plan on running CFD simulations on my beaters before fabrication.
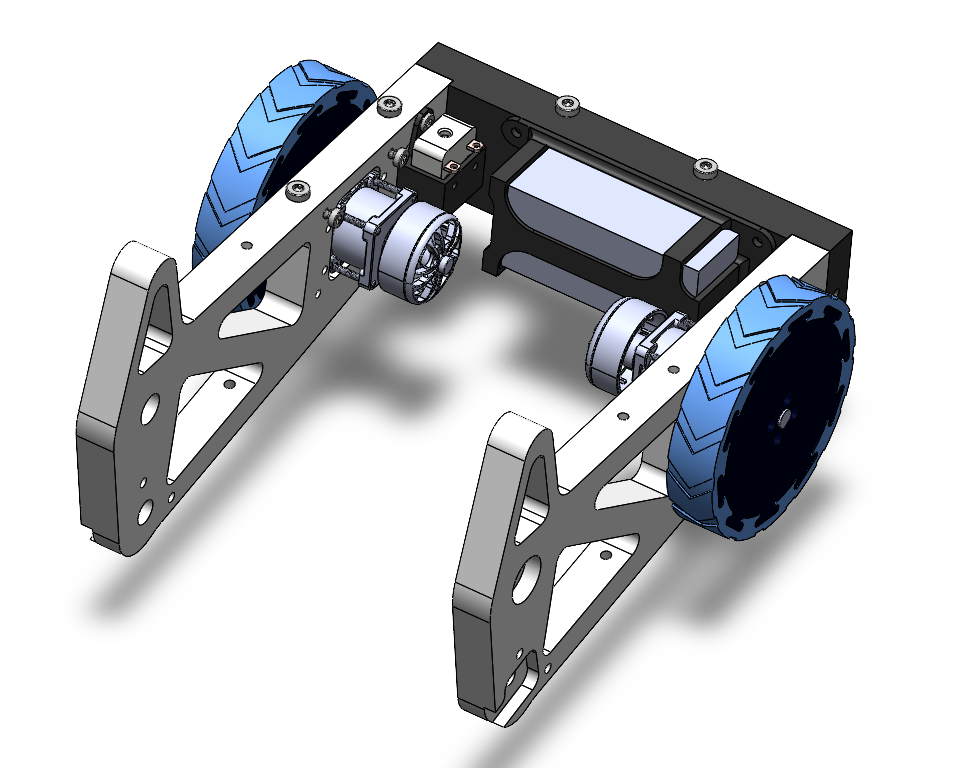
For my drive system, I used two geared down BLDCs controlled with a dual ESC. The wheels, which are mounted directly to the motor shaft, are made of a TPU hub and a vytaflex 30A outer shell which I designed molds for and I used them to cast the wheels. An important thing I kept in mind was that the wheels had to be able to reach the ground when the bot is flipped upside down, so that the bot doesn't get stuck.
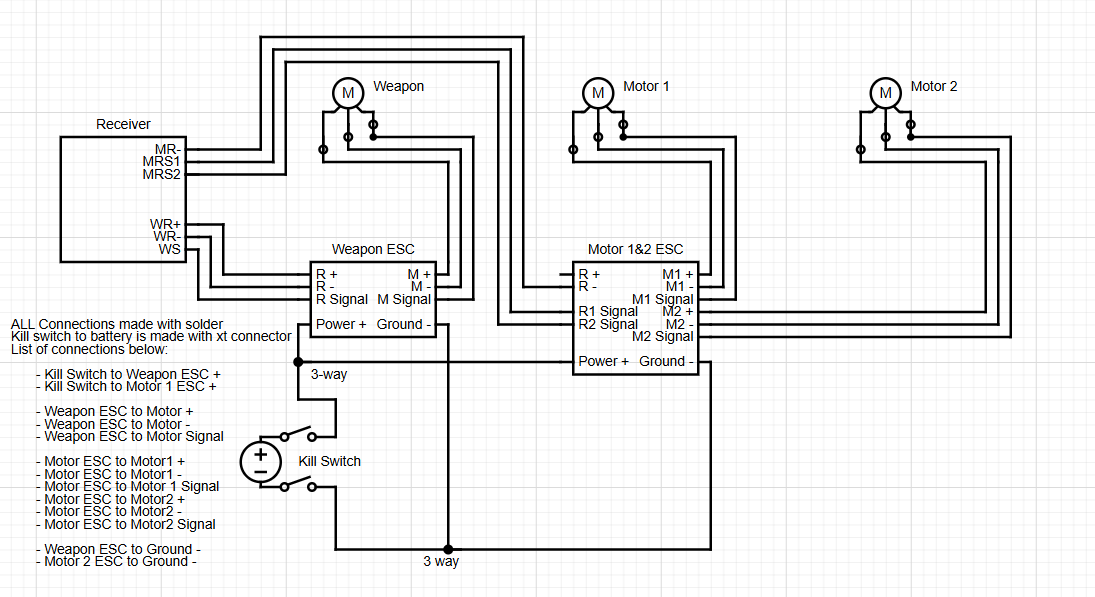
I used a drone RF transmitter and receiver to control the robot. For power, I went with an 880 mAh 4s liPO battery. According to some calculations, the 880 is supposed to run before the full match ends. Nonetheless, I decided to go with it as it is a lighter option than higher capacity batteries, and my strategy was to try to take out the other bot faster than my battery would drain. The battery is connected to a switch which I turn on with an allen key while the bot is already assembled.
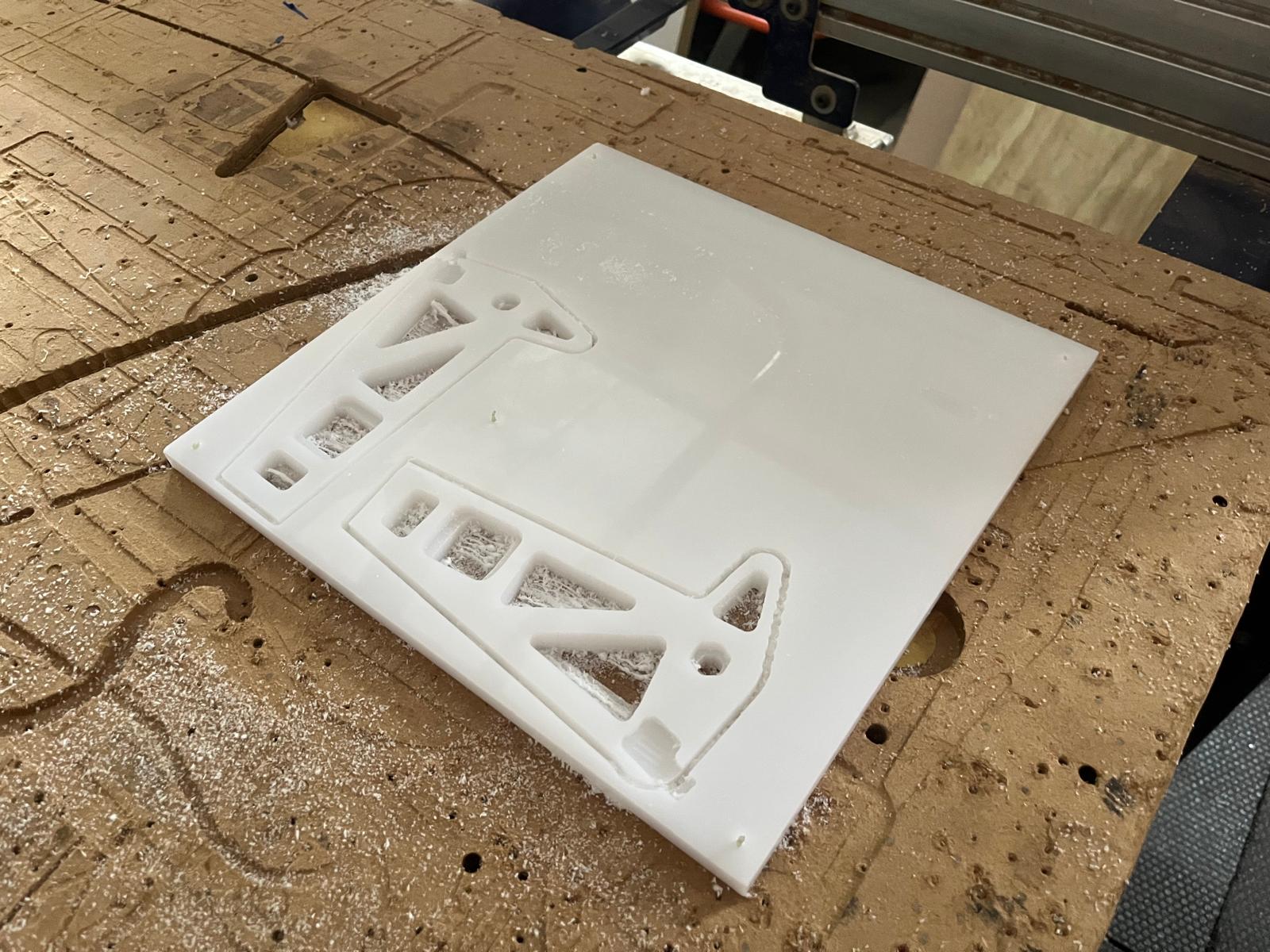
The chassis is the last subsystem and it's comprised of the top and bottom plates, the uprights (side panels), the forks, and the rear plate. The top and bottom plates are made out of carbon fiber; I waterjetted the countour of the plates then designed jigs to precisely drill the holes into them. As for the uprights, I made CNC toolpaths for them using VCarve and cut them out of UHMW on a shop bot CNC. I then used two jigs to drill holes into them as they have holes in a bunch of different directions.
My first competition was on February 7th, 2026, and it could not have gone better. Even though it was my first event, I was able to place top 8 which qualifies me to enter Pro Tour on May 16th, with a record of 4:1. The clip to the left is from my second fight against a bot called Crab Rangoon.